目录
代码地址如下:
一、前言;
- 我们已经学习
esp8266的方方面面都差不多了。貌似简单的串口通讯还没有提到,那么小徐精心准备下esp8266串口通讯封装的过程。
二、esp8266的串口分布情况;
①:
esp8266有几个串口?
- 答:我们常见的
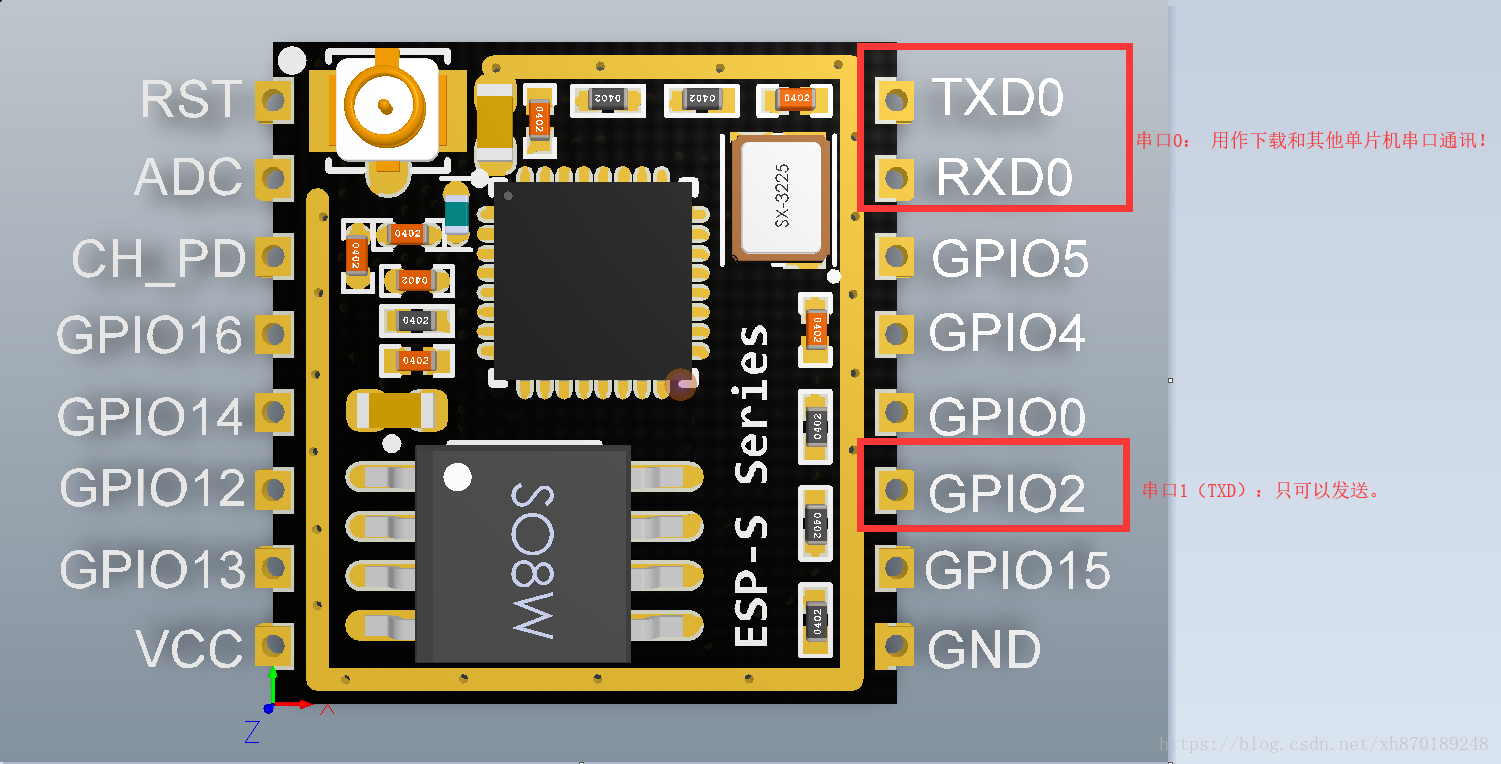
ESP8266-12f有两个 UART,其中 UARTO 有 TX、RX,可做数据传输;UART1 由于 RX 脚被 SPI-Flash 占用,只能使用 TX,可以做串口调试信息打印。见下图:串口一是在GPIO2,只可以查看信息。
②:
esp8266如何屏蔽上电打印??
- 答:不管什么情况,U0TXD默认上电有系统打印,对此敏感应用可通过UART的内部引脚交换功能,在初始化的时候,调用system_uart_swap函数。将
txd和rxd分别于U0RTS(MTDO/GPIO15)、U0CTS (MTCK/GPIO13)交换来屏蔽该上电的系统打印。 交换后,硬件上的下载管脚还是使用U0TXD + U0RXD,通信时需要将MTDO对应接到MCU的RXD,MTCK对应加到MCU的TXD。
三、esp8266的串口通讯时候,应该怎么接线;
- 如下图所示,短脚
txd和rxd作为和单片机通讯的端脚,而gpio2作为系统打印的端口,用来查看系统日志。【记得要公地】

四、esp8266的NONOS非系统,串口编程;
①:乐鑫给出的关于这个
NONOS的串口文件其实都基本没什么修改的,参考来自,初始化uart_init()方法,里面的第一个是串口0的波特率,第二个是串口一的波特率设置。②:然后通过接受数据,发生中断,进入到中断回调函数
uart0_rx_intr_handler(),如下代码:
LOCAL void uart0_rx_intr_handler(void *para) { int fifo_len; //1 接收中断禁用,用于不再接受数据,因为现在处于处理数据中 uart_rx_intr_disable(UART0); //2 清楚中断标志 WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR); CLEAR_PERI_REG_MASK(UART_INT_ENA(UART0), UART_TXFIFO_EMPTY_INT_ENA); //3 从 FIFO 读取接收到的数据长度 fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S) & UART_RXFIFO_CNT; uint8 d_tmp = 0; uint8 idx = 0; //定义一个临时接收的数据 uint8 recieveData[fifo_len]; //3. 赋值给临时数组 for (idx = 0; idx < fifo_len; idx++) { d_tmp = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF; //根据数据长度一个一个读取数据 recieveData[idx] = d_tmp; //赋值 } //做你自己的事情,recieveData[]数组就是接收到单片机的数据 //4 计数使能中断 UART0 WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR | UART_RXFIFO_TOUT_INT_CLR); uart_rx_intr_enable(UART0);} 五、esp8266的RTOS实时系统,串口编程;
- ①:
RTOS实时系统的比NONOS的稍微复杂丢丢,实现的原理和过程也是一样的,通过中断,但是代码不一样,初始化配置如下:
void uart_init_new(void) { UART_WaitTxFifoEmpty(UART0); UART_WaitTxFifoEmpty(UART1); //下位机通讯串口设置:串口0 UART_ConfigTypeDef uart_config; uart_config.baud_rate = BIT_RATE_9600; //波特率为9600 uart_config.data_bits = UART_WordLength_8b; uart_config.parity = USART_Parity_None; uart_config.stop_bits = USART_StopBits_1; uart_config.flow_ctrl = USART_HardwareFlowControl_None; uart_config.UART_RxFlowThresh = 120; uart_config.UART_InverseMask = UART_None_Inverse; UART_ParamConfig(UART0, &uart_config); //日志打印 串口一 uart_config.baud_rate = BIT_RATE_74880;//波特率为74880 UART_ParamConfig(UART1, &uart_config); UART_IntrConfTypeDef uart_intr; uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA | UART_FRM_ERR_INT_ENA | UART_RXFIFO_FULL_INT_ENA | UART_TXFIFO_EMPTY_INT_ENA; uart_intr.UART_RX_FifoFullIntrThresh = 100; uart_intr.UART_RX_TimeOutIntrThresh = 10; uart_intr.UART_TX_FifoEmptyIntrThresh = 20; UART_IntrConfig(UART0, &uart_intr); UART_SetPrintPort(UART1); UART_intr_handler_register(uart0_rx_intr_handler, NULL); ETS_UART_INTR_ENABLE();} - ②:数据中断处理函数:
```
void ICACHE_FLASH_ATTR PutUartDataToQueueFromISR(void) {portBASE_TYPE xHigherPriorityTaskWoken = pdFALSE;uint16 fifo_len = 0;uint16 buf_idx = 0;uint8* uart_fifo = NULL;fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S) & UART_RXFIFO_CNT;uint8 d_tmp = 0;uint8 idx = 0;uint8 recievHex[fifo_len];int i;for (idx = 0; idx < fifo_len; idx++) { d_tmp = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF; recievHex[idx] = d_tmp;}